PPK with Emlid Studio: a step-by-step guide
Great news for our users—we’ve released our post-processing software Emlid Studio! It is now out of beta and ready for everyday use. To get started, download Emlid Studio for Windows or macOS and install it on your computer. It is completely free and works with any GNSS receiver. Emlid Studio is a cross-platform desktop application designed specifically for post-processing. With Emlid Studio, you can convert raw logs to the RINEX format, post-process the collected static and kinematic data, geotag aerial photos, and get separate points from the track of measurements—all in one app.
Easily convert logs to RINEX format
The Convert to RINEX feature quickly converts raw data logs to the industry-standard RINEX format. You can use logs recorded in UBX, RTCM3, or old versions of the RINEX format. To convert your files, follow just three steps:
- Open the Convert to RINEX tab and choose the file you want to convert. Or simply drag and drop the file from your folder.
- Press Convert. After converting, you will see the .21O file on the plot.
- Click the Show result files button to show the converted files. Emlid Studio automatically saves them in the original folder.
Learn more in the Convert to RINEX guide.
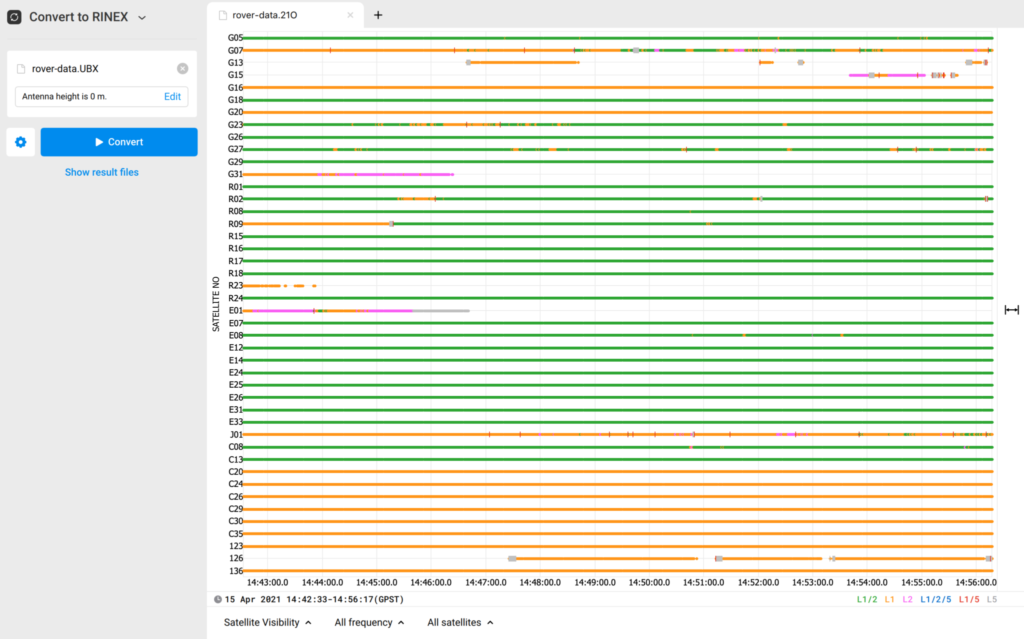
Converting logs to RINEX in Emlid Studio
Static processing: obtain a precise position of a single point
If you want to have a precise position of a single point, you can use Static processing. Usually, this workflow is used to get coordinates of a local base station when you cannot access an NTRIP service for RTK. For example, when the internet coverage is too poor, or the baseline to the nearest station is too long.
For that, you will need RINEX observation files from the CORS and the local base, as well as a RINEX navigation file from the CORS or your local base. If you recorded raw data in the UBX format or got corrections from the NTRIP service in the RTCM3 format, Emlid Studio will automatically convert them to RINEX. To post-process the collected data, follow these steps:
- Add the RINEX observation file from the local base to the Static receiver field.
- Set the antenna height by pressing Edit.
- Add the RINEX observation file from the CORS to the Base field. You will see the CORS coordinates.
- Add the RINEX navigation file from the local base or the CORS.
- Click Process. You will see the progress bar in the bottom left corner.
- Once the processing is finished, Emlid Studio will show you the processed point on the plot.
For more information, check our Docs or watch the video.
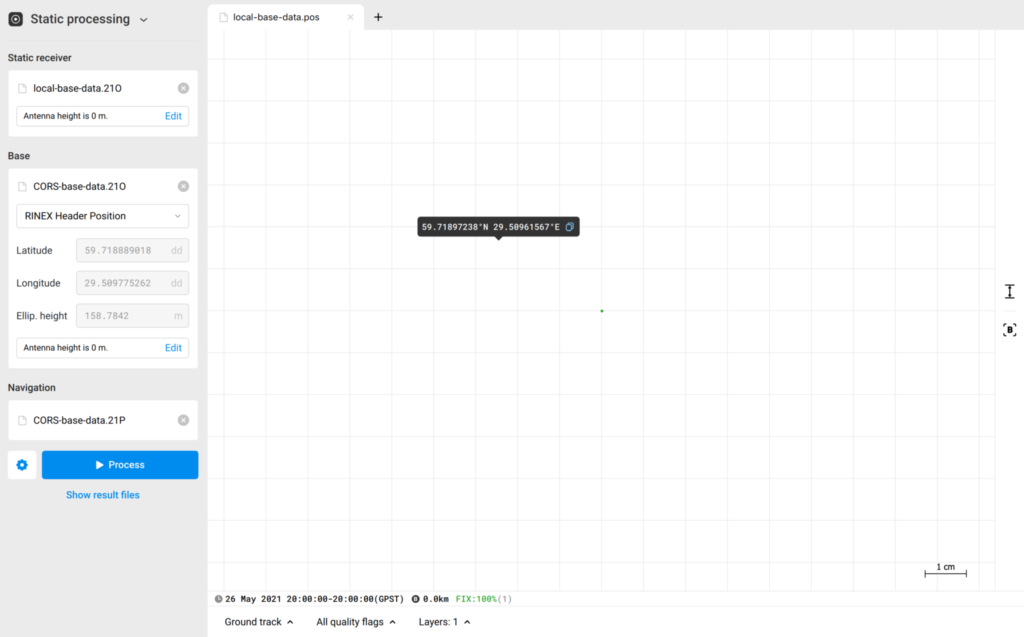
Obtained precise position of a single point in Static processing
Kinematic processing: get track of measurements
With Kinematic processing, you can post-process raw data collected without an RTK link between the base and the rover and get a precise track of measurements.
Instead of stopping at each location as in Stop & Go, the receiver logs data while in motion, and the entire trajectory can be processed later with corrections. It’s widely used in mobile mapping from vehicles or boats, and machine control in construction. Other applications include hydrographic surveys, agricultural field tracking, forestry operations, and utility or corridor inspections—any scenario where you need a precise path rather than single point measurements.
You will need RINEX observation files from the base and the rover, and the RINEX navigation file from the base or the rover. If you recorded raw data in the UBX format or got corrections from the NTRIP service in the RTCM3 format, Emlid Studio will automatically convert them to RINEX. To post-process the collected data, follow the steps:
- Add the rover RINEX observation file and enter the antenna height.
- Add the base RINEX observation file and set the base coordinates.
- Add the RINEX navigation file.
- Click Process. You will see the progress bar in the bottom left corner.
- Once the POS file is ready, Emlid Studio will show the result on the plot.
For more information, check our Docs or watch the video.
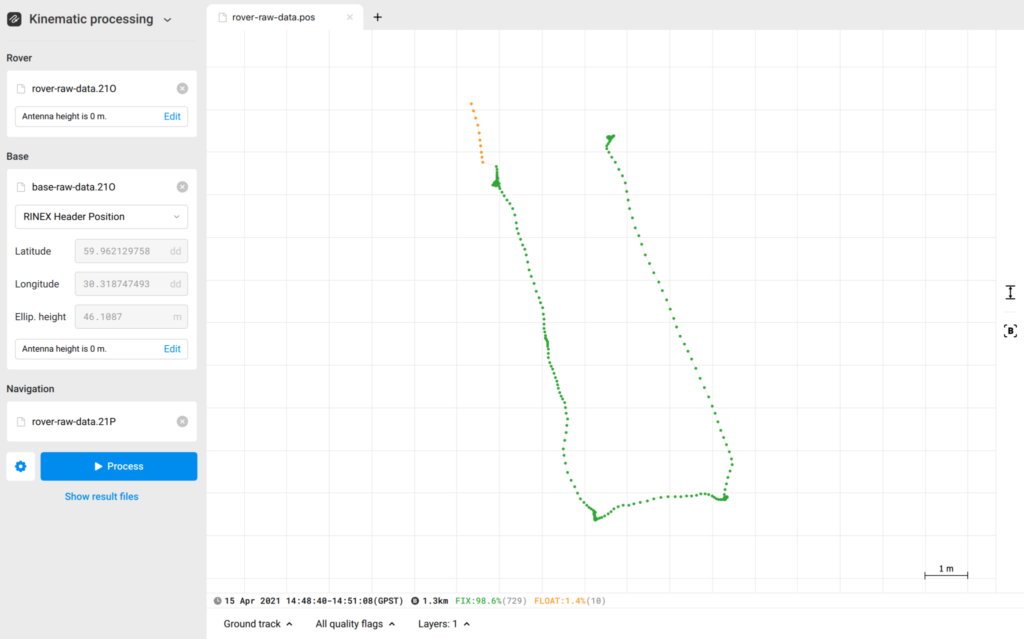
Track of measurements in Emlid Studio
Stop & Go with Emlid Flow
The Stop & Go with Emlid Flow feature allows you to improve the coordinates of points that were collected without a real-time correction link. It’s an efficient way to gather high-precision data across multiple locations—simply stop the rover briefly at each point before moving on.
Stop & Go is particularly useful in projects such as corridor mapping, construction staking, and utility pole or asset location surveys—any scenario where you need accurate points spread across a wide area without continuous data collection.
To get started, you’ll need raw data logs from both the base and the rover, along with a CSV file from the Emlid Flow app containing the points collected using the averaging method.
Then you need to post-process RINEX files from the base and the rover to get a POS file—the steps are the same as those for the Kinematic processing workflow. If you already have the POS file, you can go straight to the Generating corrected CSV section, where the POS file and Emlid Flow project file are used to calculate the precise position for each point. To get precise coordinates of separate points, follow these steps:
- Post-process RINEX files from the base and rover to get a POS file or add a ready POS file.
- Add a CSV file from Emlid Flow.
- To choose solutions to be averaged, tick the required data quality. If you want cm-accurate results, tick Fix only.
- Click Process. The result will be shown on the plot.
As a result, Emlid Studio creates a copy of the CSV file containing averaged positions, which can be used further. Learn the detailed workflow in our Docs or watch the video.

Updated points in Stop & Go with Emlid Flow
Geotag drone photos in a few clicks
The Drone data processing workflow suits both PPK and RTK drone mapping. If you perform a PPK flight, it helps you add geotags with precise coordinates to the drone images’ EXIF data captured during flight. If you fly an RTK drone, images taken in the Float—or even Single solution—can be updated with precise coordinates.
To get centimeter-precise geotags after a PPK flight, you’ll need drone images and a POS file with the events. To produce a POS file with the events, post-process RINEX files from the base and the rover in the Processing section—the steps are the same as those for the Kinematic processing workflow. If you already have the POS file with the events, you can skip it and go straight to the Geotagging section. To geotag your photos, follow these steps:
- Choose your POS file with the events’ timestamps (it’s uploaded automatically if the processing was performed).
- Select the folder that contains the photos from the drone’s camera. Emlid Studio can add geotags when the number of events equals the number of images.
- Emlid Studio creates geotagged copies of your photos in a new folder by default. If you want to save your original photos with geotags, toggle Update original photos.
- Then, click on the Tag photos button. The geotagging process will start.
- When the processing is over, you can click on Show result files to check the geotagged photos.
If you want to update the geotags of images from your RTK drone, you’ll also need to include the drone’s MRK file. All other steps remain the same.
With the geotagged photos, you can now create a map in your photogrammetry software. To learn more, visit our Docs or watch the video on our YouTube channel.
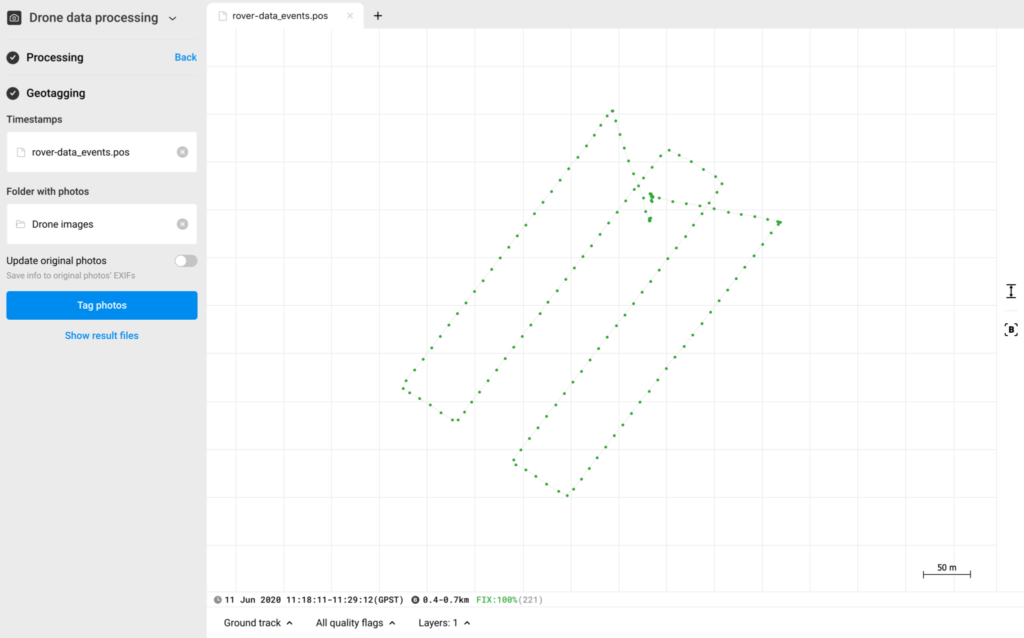
Geotagging drone photos in Emlid Studio
Data assessment and tuning
The accuracy of your results in Emlid Studio depends directly on the quality of your raw logs—bad data in means bad data out. If your results don’t look as expected, the first step is always to review your raw data. Making this a routine check can save you time and ensure higher accuracy from the start.
Emlid Studio gives you the tools to analyze and fine-tune data before processing. For example, if a drone survey produces too many FLOAT or SINGLE solutions instead of FIX, inspecting the raw data can reveal the underlying cause and help you adjust processing settings for better outcomes.
Begin by uploading your raw base and rover logs into the software. From there, you can review and refine key parameters to improve the quality of your results. When reviewing your raw data, pay close attention to satellite signal quality and satellite distribution. Emlid Studio makes this easy by providing several tools to quickly visualize and assess both.
If you discover issues like frequent cycle slips or low signal-to-noise ratios, try reprocessing with adjusted settings in Emlid Studio. In some cases, however, the raw data may be too compromised to fix. When that happens, the best approach is to resurvey under better conditions—such as selecting a clearer sky view for your rover or a more optimal base station location.
Learn more in our series of guides on data assessment and tuning.
Get Emlid Studio today
We designed Emlid Studio to simplify PPK workflow for Reach users and continue delivering new app features. Try your hands at post-processing with Emlid Studio right now, and feel free to share your experience on our Community Forum.