Reach Firmware 26 Update: Legacy RTCM3 Messages and NMEA Output Settings

We are excited to release the Reach Firmware 26 update. From today, the release is available for all devices. We’ve enhanced stability, improved the user interface, and implemented some of the long-awaited features!
Legacy RTCM3 support to work with other RTK receivers
This update allows the connection of a Reach RS2 as a base station with traditional third-party receivers and agricultural equipment. You now have this option with RTCM3 legacy messages 1004, 1008, 1012, 1033 for multi-band devices.
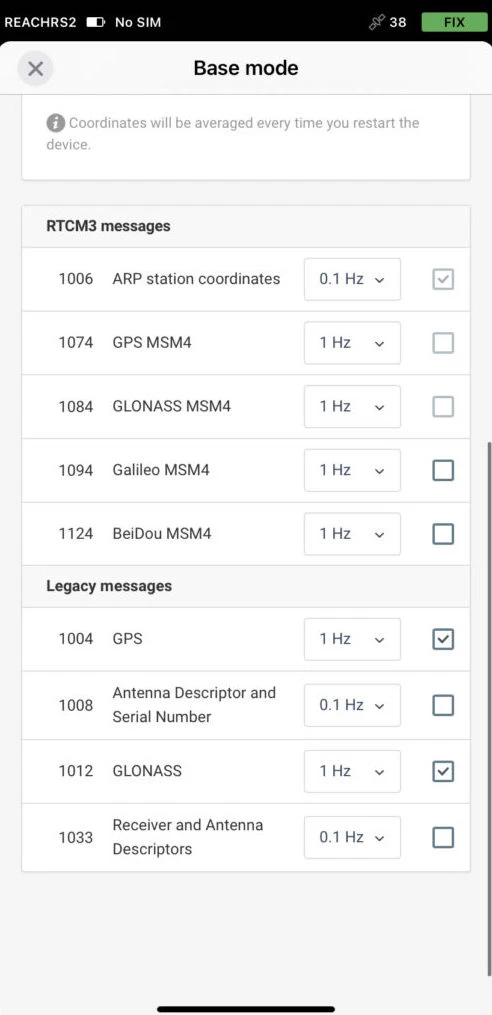
To set up various RTCM messages, go to the Base mode in the ReachView 3 app, choose your type of legacy messages and the required rate.
NMEA output configuration: talker ID and messages set
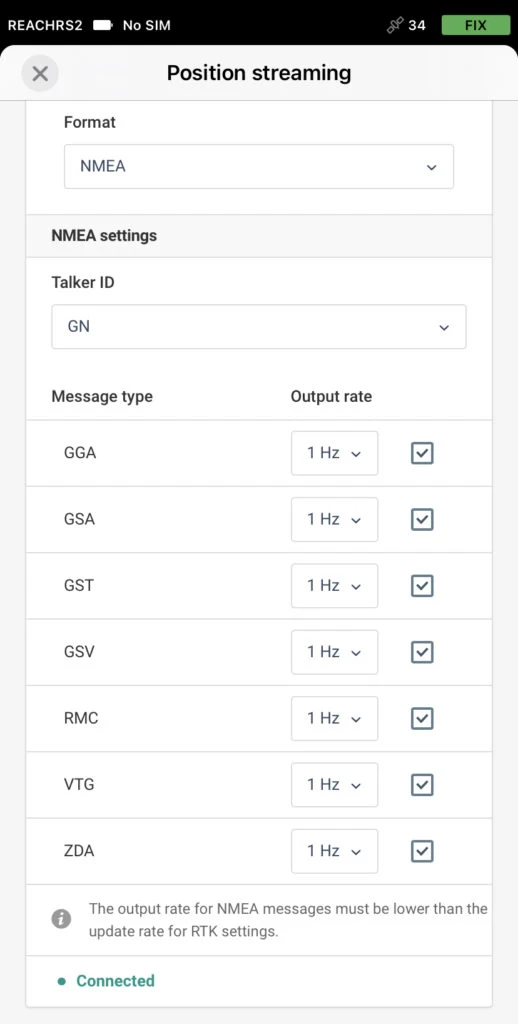
With this release, we have also added configurable NMEA position output in Reach Panel. You can choose a Talker ID and the desired set of NMEA messages.
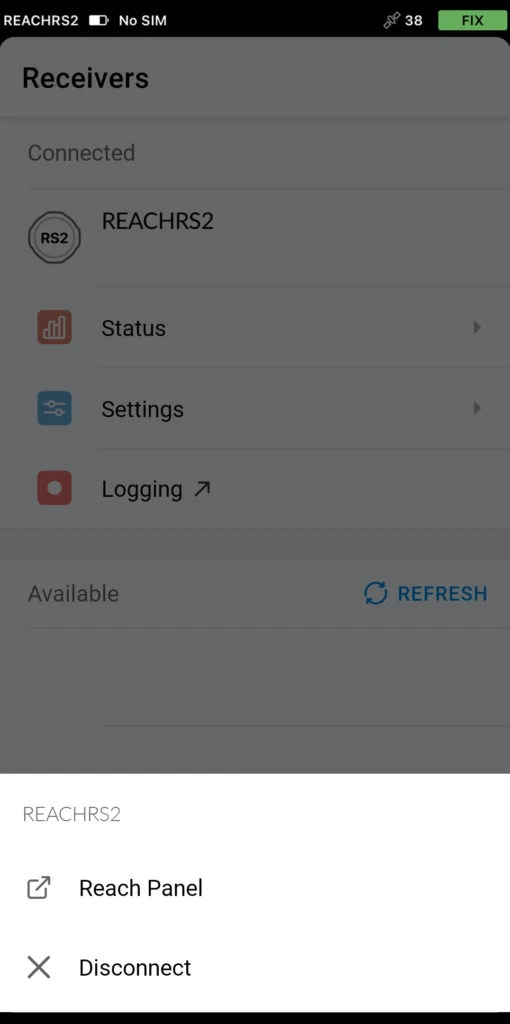
To access Reach Panel from the ReachView 3 app, go to the Receivers screen, tap the receiver’s name, and choose Reach Panel. The app will navigate you to the Reach Panel.
In the Reach Panel, open the Position Output tab, select the NMEA format, and then set up a Talker ID, the required messages, and their frequency. Keep in mind that the NMEA output rate should be equal to or lower than the RTK Settings rate.
Specifying the talker ID and the message parameters helps you connect Reach rovers to various GIS apps, software for GPR, and agriculture machinery guidance. This means that you can freely use Reach with software and hardware requiring a specific NMEA output.
To better match the current RTCM3 message configuration, the LoRa air data rate for RS2 is automatically updated with this release. If you have custom settings for the LoRa air data rate, please check them after the update. To avoid different LoRa air data rates for the base and rover, we recommend updating all your devices.
Seamless compatibility with PPP services and more
Another functional improvement is the additional fields in RINEX files for Reach RS2. Now, RINEX logs contain Antenna and Receiver header fields so that you can import the raw files into PPP services without any changes.
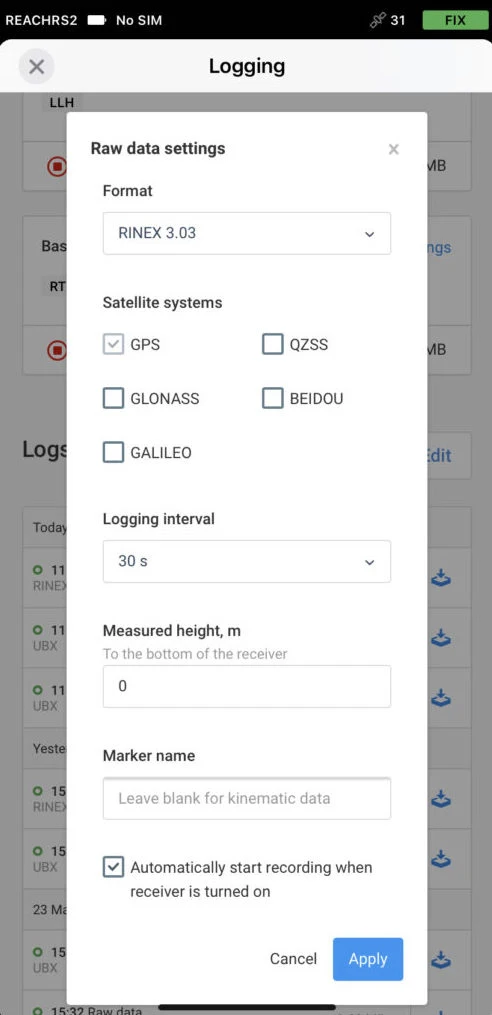
We have also added configurable RINEX logging in ReachView 3, which allows you to filter out some satellite systems (e.g., record GPS only while in GNSS all systems are enabled), log RINEX at a lower rate than GNSS rate, and enter the antenna height.
One more handy feature is logging autostart. It lets you log automatically after rebooting or turning on the device.
What’s more, this release uses the new naming and versioning schemes to differentiate it from the ReachView 3 app. Previously, we used to call firmware updates ReachView v2.24, ReachView v2.25, etc. From now on, stable firmware updates are called Reach Firmware 26, Reach Firmware 27, etc. Forthcoming features are available in Beta versions (previously known as “dev”) called Reach Firmware 26 Beta 1, Reach Firmware 26 Beta 2, etc.
Check out the complete list of fixes and improvements in the release notes on the Emlid Community Forum.