RTK corrections delivery method explained: how to choose the right setup?
Choosing the right RTK corrections delivery method directly affects your positioning accuracy, reliability, and field workflow. Should you install your own base station and rely on the radio? Use internet-based corrections? Or connect to a regional RTK network?
There’s no universal best option. The right setup depends on connectivity, project scale, and operational needs.
This guide explains RTK correction delivery methods through real-world scenarios using the Reach RS4 and Reach RS4 Pro receivers, helping you choose the right setup with confidence.
What are RTK corrections?
RTK (Real-Time Kinematic) is a positioning method that improves GNSS accuracy from meters to centimeters by correcting satellite signal errors in real time.
An RTK system uses two receivers—a base and a rover. The base is placed at a known location and sends its observation data to the rover. Because both receivers observe the same satellites, the rover can eliminate common GNSS errors, such as atmospheric delay and clock bias, to achieve centimeter-level positioning in real time.
Learn more about the RTK technique in our blog post: Basics of RTK GPS and GNSS for Non-Surveyors.
This way, the source of corrections is always a basis. The key question lies in how those corrections are delivered to the rover. You have several ways:
- Set up your own base station and transmit corrections directly to the rover via radio—LoRa or UHF.
ㅤ - Set up your own base station and deliver corrections to the rover over the internet using NTRIP (Networked Transport of RTCM via Internet Protocol). In this case, you need to use the NTRIP caster. This is a special cloud service that implements the NTRIP protocol and acts as a line of communication between connected to the internet receivers.
ㅤ - Use a dedicated corrections provider that delivers them from a network of reference stations—effectively acting as a regular base—to your rover over the internet using the same NTRIP protocol we mentioned above. Such providers are commonly referred to as NTRIP services, CORS services, or RTK network services.
ㅤ - Some providers also offer VRS (Virtual Reference Station) services. Instead of relying on individual physical reference stations—which may be widely spaced and located far from your rover—VRS combines data from multiple reference stations to mathematically generate a virtual reference station positioned closer to your rover.
While radio-based corrections are usually straightforward, the difference between an NTRIP Caster and NTRIP services can be less obvious.
As you can see, the delivery method mainly depends on the communication link—either a direct radio connection or the internet via NTRIP. A radio link is fully under your control and travels with you in the field, while cellular coverage can vary depending on location and conditions.
However, the achievable baseline length is longer with the internet and doesn’t depend on the terrain. In addition, your setup may include either two receivers, base and rover, or just a single rover.
This way, it’s more practical to evaluate your actual working conditions and choose the setup that fits them best.
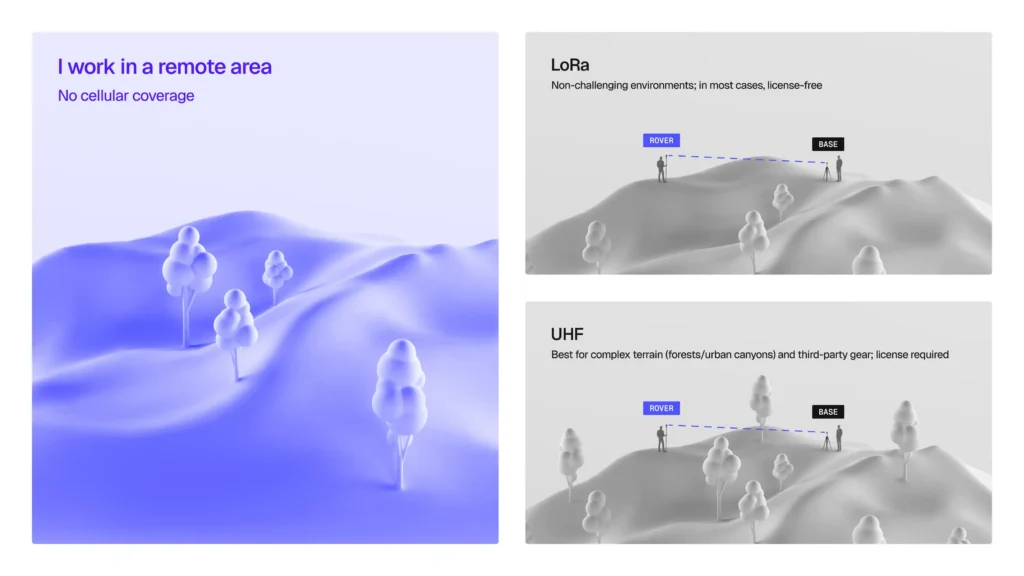
Working in remote areas without cellular coverage: LoRa vs UHF
If mobile coverage is unreliable or unavailable, your correction workflow must be fully independent. So, your recommended setup will be using your local base sending corrections to the rover via radio—LoRa or UHF. Latest Reach RS4 and Reach RS4 Pro support both two-way LoRa and UHF radios.
Advantages of LoRa setup
Although LoRa operation is subject to regional regulations, Reach RS4 and Reach RS4 Pro automatically use license-free frequencies in Emlid Flow in most regions. Where permitted, they support up to 1 W base transmit power, improving link robustness and extending baselines in challenging conditions.
Benefits of UHF setup
If you work in a challenging terrain, UHF can be a good choice where maximum signal robustness is required. Reach RS4 and Reach RS4 Pro can output corrections at up to 2W, where permitted. Plus, the UHF module filtering maintains stable radio performance even in environments with interference from other transmitters, including those located near cell towers.
In addition, the built-in UHF radio lets you mix and match Reach RS4 or Reach RS4 Pro with compatible third-party receivers. The devices support the TRIMTALK 450S protocol, enabling seamless integration into existing radio setups.
Although the receivers are shipped with region-specific limits and channel plans preconfigured in Emlid Flow to help ensure compliance, a UHF license may still be required depending on local regulations.
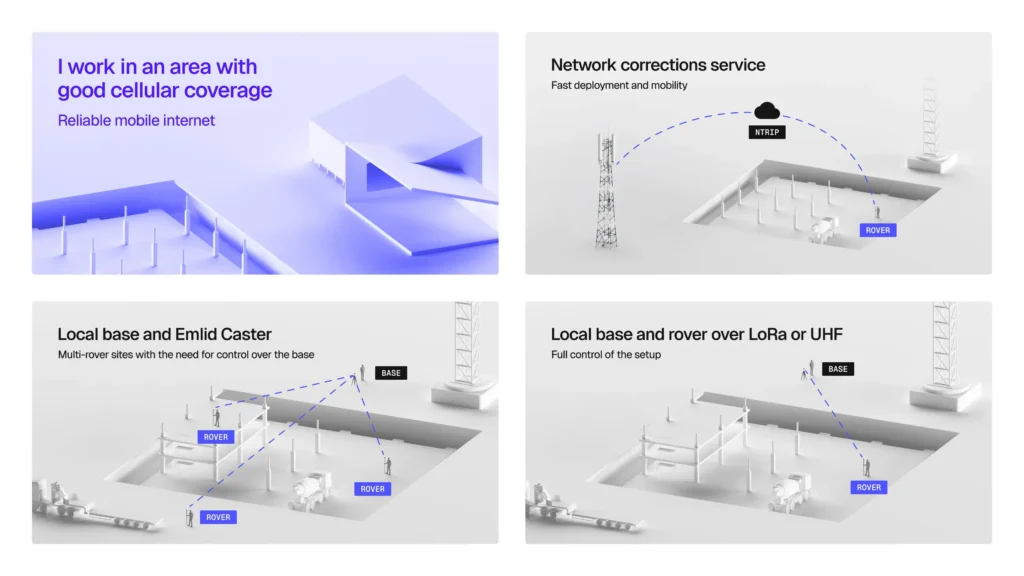
Work in areas with good cellular coverage: NTRIP service vs NTRIP caster
If you have reliable mobile internet in your working area, you have several flexible options. Your choice depends on how much control, scalability, and independence you need.
Opting for flexibility and mobility
If internet access is reliable and the nearest reference station is located within a reasonable distance, a network correction service is often the simplest and most flexible solution.
Corrections are delivered via NTRIP from the closest reference station, physical or virtual on depending on the provider, and you don’t depend on the line of sight. With this setup, you only need a rover connected to mobile internet. It’s simple to configure and requires minimal effort with the built-in BLE connectivity available on Reach RS4 and Reach RS4 Pro.
This workflow is best suited for urban environments with reliable mobile coverage, teams that frequently move between job sites, and companies looking to minimize equipment. It’s also a practical choice for projects where investing in and maintaining a base station is not cost-effective.
However, keep in mind that positioning accuracy depends on the distance to the nearest reference station. As the baseline increases, accuracy may gradually decrease. That said, in urban areas and regions with dense reference station networks, the distance to the nearest station is usually small, so this is rarely an issue. Most RTK networks are designed to maintain high accuracy across their coverage area.
Focusing on the extended operational range or fleet of rovers
If you need more control over setup and the flexibility of internet-based transmission, you can use your Reach RS4 or Reach RS4 Pro base station and distribute corrections through our free Emlid Caster.
In this setup, the base sends corrections over the internet, and the rover receives them via mobile data. Because corrections are delivered online rather than by radio, the effective range is not limited by radio coverage, allowing the base and rover to operate at significantly longer distances as long as both have internet access. And, at the same time, the base stays under your control, especially when you need absolute accuracy.
Besides, Emlid Caster supports up to 10 rovers connected simultaneously. This is especially useful when multiple field crews are working on the same site or across nearby locations and need access to the same correction source, allowing you to expand operations without deploying additional base stations. Or if you connect different types of equipment to the same base: rovers, drones, etc.
In addition, Emlid Caster supports up to 10 rovers connected simultaneously. This is especially useful when multiple field crews are working on the same site or nearby locations and need access to a single correction source, allowing you to scale operations without deploying additional base stations. It also allows different types of equipment to use the same base corrections.
This approach gives you full control over your correction source, maintains high positioning accuracy, and supports up to 10 rovers connected simultaneously—making it a scalable solution for teams working on the same or distributed projects.
Still choosing the radio despite good coverage
Even with good cellular coverage, you may still prefer working with your own base and radio link. The closer the base station is to your site, the better the positioning accuracy. When you control your own base, you know exactly where it is installed and can be fully confident in its stability.
A radio connection also eliminates the need for mobile internet. There are no interruptions due to weak signal, network congestion, or coverage gaps. Fewer external factors mean fewer risks, especially in projects where downtime is costly.
With a simpler, fully controlled setup, you reduce the number of potential failure points and feel more confident in the field. So, if your project requires maximum reliability and independence from mobile networks, using a local base with LoRa or UHF ensures corrections are transmitted directly from the base to the rover without relying on internet stability.
This can be critical for high-precision surveying, time-sensitive construction tasks, or projects where interruptions to correction data could affect productivity.
Radio setups are also preferred when you want full control over their correction workflow, avoid subscription services, or operate in environments where mobile networks may be available but inconsistent under load.
In short, good coverage gives you flexibility—but radio remains the most controlled and self-sufficient solution when reliability and independence are priorities.
Overview
| Scenario | Equipment needed | Internet required | Range limitation* | Best for |
|---|---|---|---|---|
| Local base & LoRa | Base + rover | No | The base should be within the worksite | Remote sites, in most cases, license-free |
| Local base & UHF | Base + rover | No | The base should be within the worksite | Challenging terrain or need for compatibiliy with the third-party equipment, requires license |
| Local base & Emlid Caster | Base + rover | Yes | No need for the base on the worksite | Multi-rover sites with the need for control over the base |
| RTK network (NTRIP/CORS) | Rover only | Yes | No need for the base on the worksite | Fast deployment and mobility with confidence in the internet stability |
*RTK assumes that the base and rover operate under similar environmental conditions when correcting satellite signal errors. For Emlid Reach receivers, the recommended maximum baseline is about 8 km (5 miles) with radio corrections and up to 60 km with internet corrections. As the baseline increases, atmospheric differences may reduce accuracy, so keeping the base and rover as close as possible is recommended.
Final takeaway
There is no single best RTK correction source. The right setup depends on:
- Internet availability.
- Level of independence required.
- Site size and terrain.
- Project duration.
- Number of rovers.
Modern Emlid receivers like Reach RS4 and Reach RS4 Pro support all major RTK correction workflows, allowing you to adapt your system to real-world conditions—whether you’re working downtown, across a large construction site, or far from mobile coverage.
Choose the correction method that matches your field conditions—not just the one that seems easiest on paper.
Not sure what RTK setup is best for your workflow? Contact our team—Emlif application engineers will help you to choose the right solution for your fleet and job site.
Frequently asked questions
RTK corrections always come from a base station, but you don’t always need to deploy your own. You can use an NTRIP/CORS service provider, where the provider’s reference stations supply the corrections over the internet. In this case, you need a reliable cellular coverage.
RTK corrections can be delivered in several ways. You can transmit them directly from your own base station to the rover using radio, LoRa, or UHF, send them over the internet from your base through an NTRIP caster, or receive them from an RTK network service (NTRIP/CORS) that provides corrections from its reference station network.
Radio corrections are sent directly from the base to the rover and typically require a clear line of sight. Internet-based corrections are delivered via the NTRIP protocol over mobile data, which removes line-of-sight limitations and allows corrections to be received from network providers or distributed from a single base to multiple rovers or different types of equipment using Emlid Caster.
The main factors are internet availability, terrain, project scale, and the level of independence required. Radio corrections work best in areas without cellular coverage, while internet-based corrections offer greater flexibility and longer operational range when reliable mobile connectivity is available.
If obstacles block the radio signal between the base and rover, using internet-based corrections via NTRIP is usually the option. Since corrections are delivered over the internet, they are not affected by terrain or line-of-sight limitations.
Yes. A single base station can provide corrections to multiple rovers simultaneously. When corrections are delivered over the internet using Emlid Caster, a single base can distribute them to several rovers or different types of equipment simultaneously. This setup requires an internet connection for both the base and the rovers.
With radio, range depends on terrain and radio power, typically covering several kilometers. With internet-based corrections, the distance can be much greater, but accuracy may decrease as the baseline grows.
LoRa is often the easiest option because it usually operates on license-free frequencies. UHF is better for challenging terrain or when compatibility with existing radio systems is required.
An RTK network works best where mobile internet is reliable, and reference stations are nearby. It requires only a rover and allows fast deployment.
Using your own base gives you full control over the correction source and ensures the base is close to your site, which helps maintain high accuracy.